Расширяем OpenPLC с CAN bus
Эта статья является продолжением серии для демо-проекта на базе OpenPLC. В предыдущей части были рассмотрены программирование Raspberry Pi Pico W в режиме Modbus RTU/TCP Slave, управление реле через Ladder-диаграмму. Теперь пришло время добавить в схему CAN-шину. Что добавляется в этой части: узел
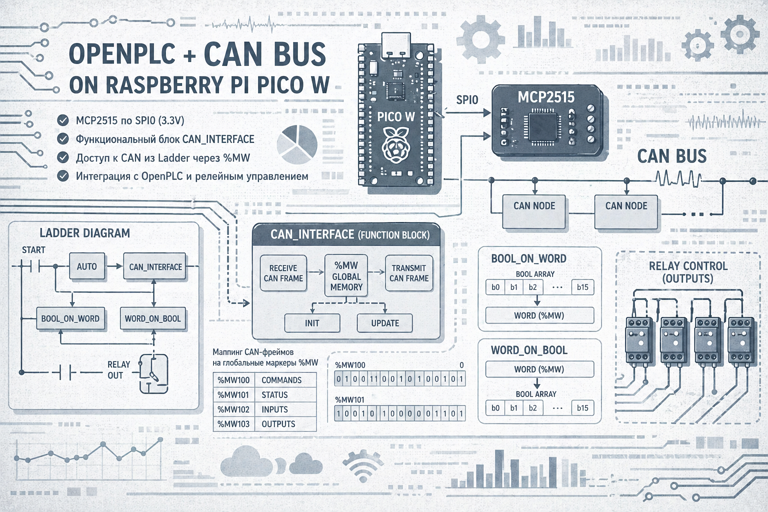
Image: Habr
Эта статья является продолжением серии для демо-проекта на базе OpenPLC. В предыдущей части были рассмотрены программирование Raspberry Pi Pico W в режиме Modbus RTU/TCP Slave, управление реле через Ladder-диаграмму. Теперь пришло время добавить в схему CAN-шину.
Что добавляется в этой части: узел Pico W получает модуль MCP2515 и подключается к CAN-шине. Для этого в OpenPLC Editor написан пользовательский функциональный блок, который работает поверх ардуино-библиотеки и предоставляет доступ к CAN-шине из обычной Ladder-программы через глобальные переменные-маркеры %MW.
Оригинальная статья
Расширяем OpenPLC с CAN bus
Опубликовано Habr